


Tero Kaarlela
Sakari Pieskä
Tomi Pitkäaho
European Robotics Forum (ERF) on vuodesta 2010 lähtien vuosittain järjestetty Euroopan vaikuttavin robotiikka-alan tapahtuma, joka kokoaa yhteen alan asiantuntijat eri puolilta Eurooppaa. Centrian edustajat ovat osallistuneet tapahtumaan vuodesta 2018 alkaen, jolloin tapahtuma järjestettiin Tampereella. Vuonna 2019 ERF järjestettiin Bukarestissa, vuonna 2020 Malagassa, ja vuonna 2021 tapahtuma oli koronan vuoksi virtuaalinen.
Perinteisesti ERF järjestetään alkukeväästä maaliskuussa, mutta tänä vuonna tapahtuman järjestäjät päättivät siirtää tapahtuman kesäkuun viimeiselle viikolle koronan vuoksi. Tämänkertainen Rotterdamissa järjestetty ERF2022 (https://erf2022.eu/) oli Centrian kannalta erilainen edellisiin verrattuna, koska saimme järjestää Trinity-hankkeen partnerien ja Oulun yliopiston kanssa oman interaktiivisen työpajan.
ERF2022-tapahtumapaikka ja keynote-luentojen pääsisällöt
ERF2022 toteutettiin vuonna 2020 valmistuneessa AHOY-kongressikeskuksessa. Tapahtuma jakaantui isoon näytteilleasettajille varattuun tilaan ja useisiin esitystiloihin, joissa järjestettiin rinnakkaisesti luentotyyppisiä työpajoja aihealueittain. Pääsalissa pidetyllä tapahtuman avausluennoilla korostettiin automaation ja robotiikan avulla toteutetun kestävän kehityksen merkitystä ilmastonmuutoksen vastaisessa taistelussa. ERF2022-tapahtuman järjestämisvastuussa olleen paikallisen Twenten yliopiston professori Stefano Stramigioli kehotti jatkossa kouluttamaan insinöörejä, jotka osaavat ajatella, kuinka suunnitellaan konsepteja ja tuotteita kestävän kehityksen periaatteiden mukaisesti. Tiivistettynä hänen viestinsä voisi muotoilla muotoon “Teach to Think”.
Kestävää kehitystä ja robotiikan merkitystä osana energiatehokasta tuotantoa korosti myös pääsponsori Castrolin globaalien markkinoiden johtaja Susan Frame. Voiteluainetoimittajana hyvin tunnettu Castrol kehittää ja toimittaa voiteluaineiden lisäksi asiakkailleen myös robotiikkasovelluksia. Toisena yllättävänä yrityksenä avausluennoilla olleen BP:n (British Petrolium) digitaalisen tieteen varapresidentti Elinor Doubell esitteli yrityksen digitalisaatioon, uusiin teknologioihin ja robotiikkaan liittyvää työtään ja sitä, miten niitä voidaan hyödyntää kestävässä kehityksessä.
Avausluentojen lopuksi brittiläisen Tharsus-yhtiön suomalainen toimitusjohtaja Joni Rautavuori kertoi yrityksensä visioista ja kokemuksista siitä, miten robotiikalla voidaan vaikuttaa ilmastonmuutokseen. Tharsus on alkujaan ohutmetallialan yritys, joka on viime vuosina keskittynyt robotiikkaan ja automaatioon, minkä vuoksi ABB:n johtotehtävissä ollut Rautavuori on palkattu yritykseen vuoden 2022 alussa. Rautavuori korosti havainnollisen piirakkakuvion avulla, että menestyvässä yrityksessä kestävän kehityksen, tuottavuuden ja joustavuuden täytyy olla tasapainossa. Aloitusluentojen lisäksi myös muiden päivien keynote-luennoissa korostettiin kestävän kehityksen, ympäristökysymysten ja yhteiskunnallisen hyvinvoinnin merkitystä yritysten kilpailukyvyn kehittämisen ohella.
Tekoäly robotiikan ytimessä
Robotiikka- ja tekoäly -aiheisia työpajoja oli tapahtumassa runsaasti, ja harmittaakin, ettei kaikkiin rinnakkaisiin luentoihin voinut osallistua. Varsinaisten tekoälytyöpajojen lisäksi tekoälyn hyödyntämistä käsiteltiin mm. hoiva-alan, maatalouden ja rakentamisen robotiikan yhteydessä.
Nobel Turing -haasteeseen osallistumisesta kertova työpaja oli ensimmäisten työpajojen joukossa. Nobel Turing -haasteen ideana on kehittää tekoälysovellus, joka tekee ja raportoi Nobel-tasoisen tieteellisen läpimurron vuoteen 2050 mennessä. Tekoälyn täytyy saavuttaa ja julkaista tieteellinen läpimurto siten, ettei Nobel-komitea havaitse tekoälyn olevan saavutuksen takana.
Tärkeitä toimenpiteitä erilaisten tekoäly- ja robottijärjestelmien kehittämisessä ovat erilaiset kilpailut ja haasteet. Yhtenä tämän alan toimijana työpajan järjesti H2020-rahoitteinen METRICS-hanke, joka pyrkii toteuttamaan arviointikriteereitä tasapuoliseen arviointiin.
Tekoälyn yhdessä robotiikan kanssa uskotaan vaikuttavan jo nyt ja yhä enemmän lähitulevaisuudessa joustavaan, ketterään ja tehokkaaseen teolliseen valmistukseen myös pienemmillä tuotantoerillä. Tähän aihealueeseen keskittyivät Karol Janikin (Manufacturing Technology Centre) ja Michael Suppan (Roboception GmbH) järjestämät työpajat. Suppan työpaja keskittyi erityisesti konenäköön ja tekoälyn hyödyntämiseen osana robotiikkaa.
Tekoäly on vahvasti mukana myös sosiaali- ja terveysalan toimintojen kehittämisessä. ERF2022:ssa esiteltiin yhtenä kärkihankkeena Helsingin yliopistollisen sairaalan vetämää AICCELERATE-hanketta, jossa koneoppimisen ja pilottien avulla pyritään skaalautuvan tekoälyn kehittämiseen sairaalaympäristön erilaisiin tarpeisiin. Oulun yliopistollinen sairaala vetää yhtä pilottia. Myös Trinityn sisarprojektin DIH-HERO:n esityksissä tekoäly oli usein mukana sote-alan robotiikka-innnovaatioiden kehittelyssä.
Maatalouden robotiikka kehittyy kovaa vauhtia
Robotiikan hyödyntämisestä maanviljelyssä oli tarjolla useita työpajoja, joista yhden teemana oli viinirypäleiden poimiminen mobiilirobottien avulla. Suurimpina haasteina tutkijat pitivät rypäleterttujen kypsyysasteen tunnistamisen, vaikeakulkuisen maaston sekä riittävän hellävaraisen tarttujan kehittämisen. Kypsyysasteen tunnistaminen oli ratkaistu kehittämällä konenäköön perustuva tekoälysovellus, joka oppii viinirypäleiden oikeanlaisen kypsyysasteen värisävyjen perusteella. Tarttujan sekä maastossa kulkemisen parissa oli työskennellyt espanjalainen robottivalmistaja PAL Robotics, joka oli muokannut sisätiloihin tarkoitetun mobiilialustan soveltuvaksi pehmeille nurmikentille ja kehittänyt tarttujaratkaisun pehmeille viinirypäletertuille sopivaksi.
Maatalouden robotiikan työpajoissa valotettiin myös tulevaisuuden globaalisti haastavia ruuantuotannon kysymyksiä. Maailman väestön on ennustettu kasvavan 10 miljardiin vuoteen 2050 mennessä, ja ruuantuotantoon soveltuvaa maata on 50 % maaperästä. Tämä asettaa suuria haasteita resurssitehokkaalle maataloudelle. Tähän tarvitaan automaatiota ja robotiikkaa, varsinkin kun osaavaa työvoimaa on vaikeaa saada maatalouteen. Työpajoissa esiteltiin lukuisia mobiilien työkoneiden tai maatalousrobottien prototyyppejä ja niihin liittyviä hajautettuja, usein agenttipohjaisia ohjausjärjestelmiä. Näyttelyosastolla oli monipuolisesti navetta-automaation markkinajohtajan, hollantilaisen Lelyn tuotteita (KUVA 1). Lely järjesti myös hackathon -tapahtuman opiskelijoille omien tuotteidensa kehittämiseksi.

Maanrakentamisen ja raivaustöiden robotiikka
Etäohjaus-työpajan teemana olivat etäohjattavat raivaustraktorit. Usein maanvyöryn koneellisiin jälkitöihin päästään vasta, kun maaperä on rauhoittunut järistyksen jälkeen useita vuorokausia. Etäohjattavat koneet voidaan lähettää raivaustöihin paljon aiemmin kuljettajien ohjatessa koneita etänä turvallisen välimatkan päästä videoyhteyden avulla.
Maanrakentamisen robotiikassa kehityskohteina ovat autonomiset koneet ja parviäly. Autonomisesti liikkuvat suuret maansiirtokoneet voivat tuoda urakoitsijalle merkittäviä säästöjä polttoainekuluissa. Esimerkiksi maansiirtoauto kuluttaa polttoainetta noin 100 litraa tunnissa, eli 2 400 litraa yhden vuorokauden aikana. Ennakoiva autonominen järjestelmä voi säästää urakoijalle 5 % polttoainetta, joten vuositasolla puhutaan merkittävistä säästöistä. Parviälyyn perustuvassa autonomisessa järjestelmässä ajoneuvot viestivät toisilleen ja ovat tietoisia toistensa sijainnista, suunnasta ja nopeudesta. Tämän vuoksi reitit ja ajonopeudet ovat tarkkaan koordinoituja. Kun kuorma-auto siirtyy lastauspaikalle juuri oikealla nopeudella, kaivinkone vapautuu lastaamasta edellistä kuorma-autoa juuri seuraavan saapuessa paikalle. Polttoainesäästöt syntyvät tarkkaan suunniteltujen reittien, ajonopeuksien ja ajoituksen summana. Työpajassa esiteltiin Suomessa ja Japanissa tehtyjä kokeiluja sekä todettiin tällä hetkellä haasteelliseksi koneiden viestiminen jaetuilla työmailla, joilla eri toimijoiden koneet jakavat samat reitit ja lastauskoneet.
Liikkuvia kunnossapitorobotteja
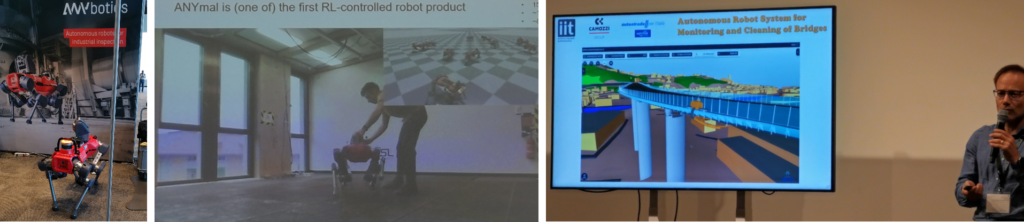
ANYbotics esitteli sekä luennolla että näyttelyalueella pitkälle kehitettyä kävelevää nelijalkaista ANYmal-robottiaan ja sen käyttöä teollisuuden tarkastustehtävissä (KUVA 2). ANYmalin esiteltiin olevan ensimmäisiä vahvistettua oppimista käyttäviä mobiilirobotteja kunnossapitoon. Robotti pystyy nousemaan 30 asteen kulmassa ja 250 mm:n esteiden yli, ja sen suojausluokka on IP67. Robotin paikoitustarkkuudeksi luvataan 1 cm ja sen kerrotaan kartan tehtyään pystyvän navigoimaan itsenäisesti myös ilman internet-yhteyttä. Näyttelyalueella liikkuessaan tämäkin robotti oli kuitenkin kävelytettävä robotti, eli se oli jatkuvassa käyttäjän ohjauksessa ilman autonomisia toimintoja. Muidenkin kameralla varustettujen kävelevien ja pyörillä liikkuvien mobiilirobottien potentiaalisiksi tehtäviksi teollisuudessa kerrottiin tarkastus- ja kunnossapitotehtävät, mutta ne olivat vielä pitkälti demoasteella.
Genovan muutama vuosi sitten romahtaneen sillan paikalle rakennettuun uuteen siltaan on integroitu kunnossapitorobotti (KUVA 2), joka pystyy tarkastustehtävien lisäksi myös pesutoimintoihin. Kiskoilla kulkeva robotti pystyy autonomisiin toimintoihin ja se kerää jatkuvasti tietoa analysoitavaksi, jotta pystytään tulevaisuudessa varmistamaan, ettei siltaromahdus uusiudu.
Robotiikkaa kokeillaan hoiva-alalla ja lääketieteessä
Terveydenhuollon robotiikassa esiteltiin palvelurobotteja, jotka valmistavat erilaisia ruoka-annoksia pyynnöstä sekä tarjoilevat annokset vanhainkodeissa. Työpajan yhteydessä keskusteltiin robottien haju- ja kuuloaistien tärkeydestä vanhustenhoidon sovelluksissa. Usein hiljaiset avunpyynnöt saattavat peittyä hoitajan kuuloaistilta yleisen melun sekaan, mutta kuuloaistilla varustettu robotti kykenee erottamaan hiljaisenkin avunpyynnön melun joukosta ja tekemään joko hälytyksen tai tarkistamaan tilanteen vakavuuden omatoimisesti. Hajuaisti voisi olla tärkeä ominaisuus esimerkiksi alkavan tulipalon havaitsemisen yhteydessä, koska usein haju on tulipalon ensimmäinen merkki.
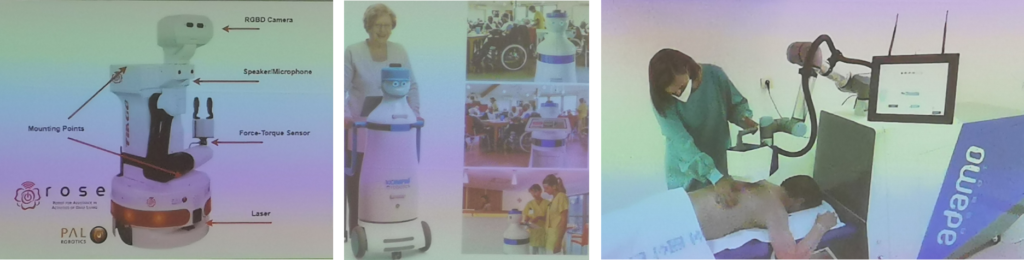
Luennoissa esiteltiin useita sote-sovelluksiin suunniteltuja sosiaalisia palvelurobotteja, mm. PAL Roboticsin Rose-palvelurobotti ja Kompai Roboticsin uusin Kompai-robotti, joka on päivitetty versio Centrian Kaveri-robotista (KUVA 3). Muutamia sosiaalisia robotteja oli esillä myös näyttelyalueella (KUVA 4).
Mielenkiintoinen kokeilu cobotin (collaborative robot, yhteistyörobotti) hyödyntämisestä sote-alalla on selkäkipujen hoitoon tarkoitettu amerikkalainen Adamo-robotti, jossa Universal Robotin työkaluksi on toteutettu 3D-skannerin ja lämpökameran muodostama mittalaitteisto (KUVA 3). Hoitaja mallintaa aluksi potilaan selän muodot ja saa lämpökameramittauksesta tiedot hoitoa tarvitsevista kohdista eri väreillä. Tämän jälkeen näihin kohtiin johdetaan työkalun avulla lämmitettyä paineilmaa kosketuksettomaksi hieronnaksi. Robotin toiminnot tallennetaan ja niitä voidaan toistaa hoitohenkilökunnan arvion pohjalta riittävän monta kertaa. Tallennettuja tietoja voidaan myöhemmin käyttää hoitojen onnistumiseen liittyvässä data-analyysissä.
Palvelu- ja mobiilirobotit vahvasti esillä näyttelyalueella
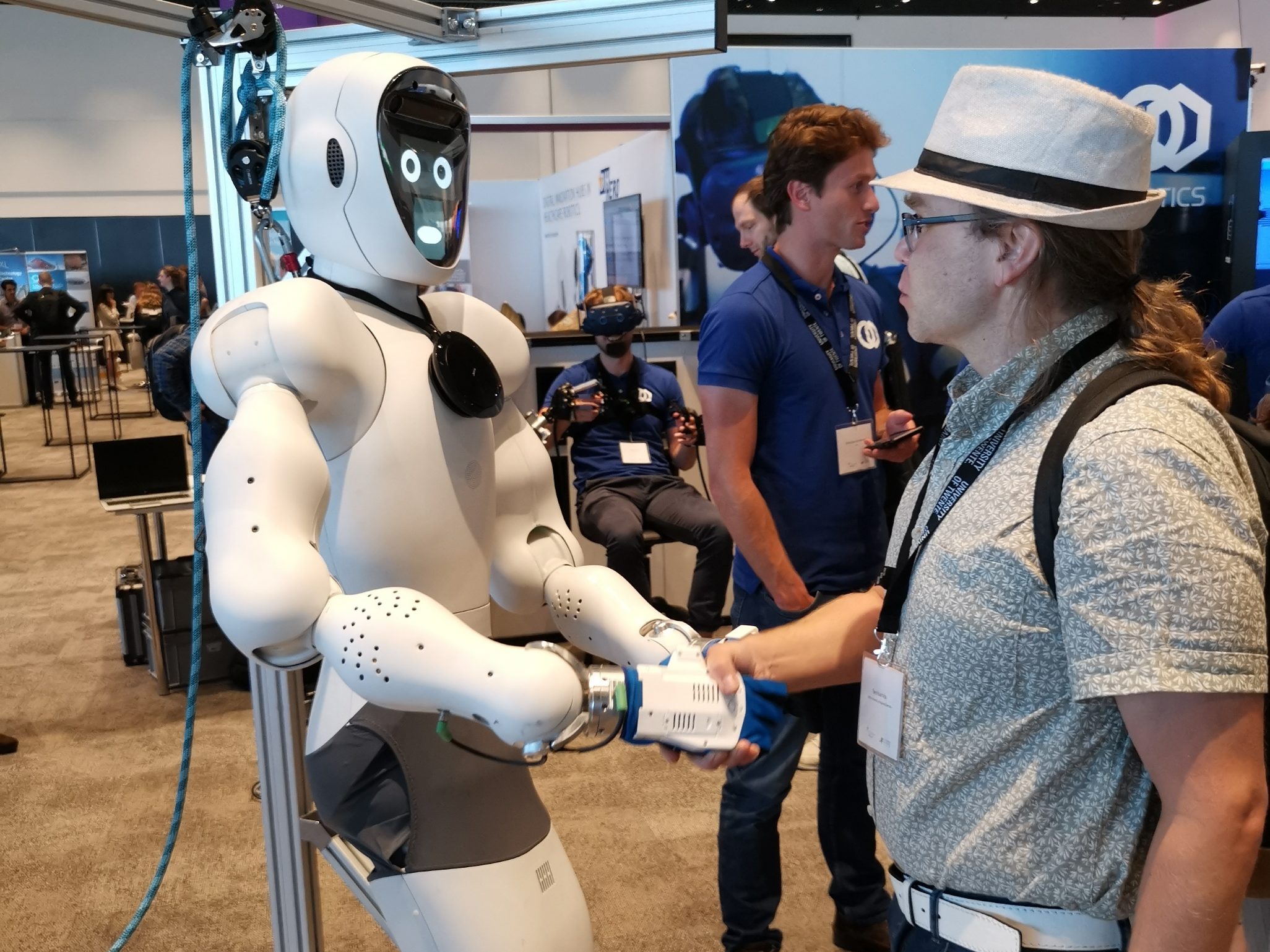
Näytteilleasettajia on ERF:ssä perinteisesti paljon. Mielenkiintoisia tuotteita ja konsepteja esittelivät tälläkin kertaa sekä laitevalmistajat että tutkimuslaitokset. Pääsimme omakohtaisesti kokeilemaan joitakin esillä olleista tuotteista. Shadow Robot esitteli robotteihin suunniteltua taitavaa monisormista tarttujaa, jonka mekaniikka jäljittelee ihmiskättä. Tarttuja on saatavilla joko viisi-, neljä- tai kolmesormisena. Viisisorminen versio sisältää neljäkymmentä toimilaitetta, joista jokaista voi tarvittaessa ohjelmoida erikseen. Tarttujaan voidaan liittää myös haptinen etäohjausjärjestelmä. Tapahtumassa olikin esillä demonstraatio, joka mahdollisti yhteistyörobotin ja siihen liitetyn viisisormisen tarttujan ohjaamisen etänä, oman käden ja sormien liikkeillä.
QT-robot on pieni interaktiivinen humanoidirobotti, joka voi liikuttaa yläraajojaan, puhua ja vastaanottaa eleitä ja puhekomentoja. QT-robotin valmistaja on rakentanut ohjelmistonsa Robot Operating System -ohjelmiston (ROS) päälle, ja robotin ohjelmoiminen on tehty helpoksi. Ohjelmointi tapahtuu tietokoneella graafisesti toimilohkoja yhdistelemällä. QT:n ohjelmisto sisältää valmiit toimilohkot eleille, liikkeiden seuraamiselle, puheelle ja puheen tunnistukselle. Tuote on pääasiassa tarkoitettu lapsille sosiaalisten taitojen harjoittelua varten.
Yhdysvaltalainen HEBI Robotics esitteli tapahtumassa mielenkiintoista robotiikan rakennussarjaa, josta voi koota robotin tarpeen mukaan. Rakennussarjoja on erikokoisia, ja ne sisältävät liikeyksiköitä, antureita, tarvittavan virtalähteen sekä ohjelmoitavan ohjausyksikön. Esillä ollut demonstraatio oli erittäin taitavasti tasapainotteleva mobiilirobotti. Emme saaneet HEBI:n tasapainoa horjumaan lukuisista yrityksistä huolimatta.
PAL Roboticsilla on kattava valikoima erilaisia mobiilialustoja ja palvelurobotteja. Mielenkiintomme herätti erityisesti Tiago, joka on mobiilialustan päälle asennettava yksi- tai kaksikäsivartinen palvelurobotti. Kummankin käsivarren käsittelykyky on 2,5 kg, ja käsivarret voidaan varustaa joko erilaisilla tarttujilla tai muilla työkaluilla. Käsivarret ja alusta ovat erikseen ohjelmoitavissa, ja Tiago vaikuttaakin monipuoliselta palvelurobotilta erilaisiin tehtäviin. Tiagoa voisi mahdollisesti soveltaa myös teollisuuden tarpeisiin esimerkiksi pienissä kokoonpanotehtävissä, joissa vaaditaan myös komponenttien keräilyä kokoonpanopisteelle. Kuvassa 4 on esillä edellä mainittuja tuotteita.

Centrian järjestämän interaktiivisen työpajan toteutus onnistui hienosti
Oman työpajan järjestämisen vuoksi tapahtuma alkoi Centrian osalta jo syyskuun 2021 lopulla, jolloin laadimme ja lähetimme ehdotuksen työpajasta nimellä ”Interactive Remote Education of Smart Industrial Robots”. Ehdotus laadittiin yhdessä kolmen yliopiston kanssa: UiT Narvik, LMS Patras ja Oulun yliopisto. Työpaja suunniteltiin interaktiiviseksi niin, että yleisöllä olisi mahdollisuus osallistua esityksiin. Tapahtuman järjestäjät hyväksyivät ehdotuksemme, joten pääsimme suunnittelemaan sisältöjä ja esityksien järjestystä yhdessä toisten osallistujien kanssa. Tammikuun puolivälissä aloimme aktiivisen suunnittelun työpajan yksityiskohtaisesta 80 minuutin toteutuksesta. Suunnittelu tapahtui joka toinen viikko järjestetyissä etäpalavereissa. Palaverien aikana tarkistettiin esitysten sen hetkinen tilanne ja sovittiin jatkotoimenpiteistä. Palaverien ja niiden välissä tehdyn työn tuloksena syntyi ehyt ja yhtenäinen robotiikan koulutusta käsittelevä esityskokonaisuus.
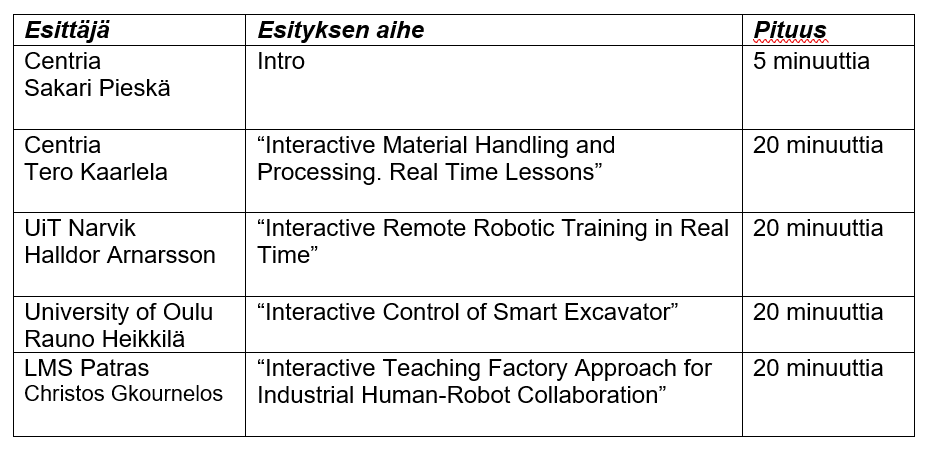
Centrian ja Narvikin teemana esityksissä oli kevään 2022 aikana robotiikan etäkoulutukseen yhteistyössä rakennettu oppimisalusta. Oppimisalusta mahdollistaa opiskelijoille robotiikan etäoppimisen ja robottien etäohjaamisen. Oulun yliopiston esitys keskittyi autonomisiin ja etäohjattaviin maansiirtokoneisiin. Patraksen yliopisto esitteli uudenlaisen ”Teaching Factory”-konseptin. Valitettavasti Patraksen Christos Gkournelos sairastui koronaan juuri ennen tapahtumaa, mutta konseptin esittely kuitenkin onnistui hyvin etänä Zoomin kautta. Työpajamme esityslista on esitetty taulukossa 1.
TAULUKKO 1. Lista työpajan esityksistä
Centrian esityksen aikana yleisöstä valittiin vapaaehtoinen henkilö, jonka tehtävänä oli ohjata oppimisalustan kautta etänä yhteistyörobottia ja mobiilirobottia. Robotit sijaitsivat fyysisesti Centrian Robo3D Labissa Ylivieskassa, ja niitä ohjattiin reaaliajassa Rotterdamista iPadilla. Yhteistyörobotin etäohjaamisessa päämääränä oli siirtää muovinen kuutio paikasta A paikkaan B. Tehtävän alkuvaiheissa kuutio putosi robotin otteesta, mutta yhteistuumin vapaaehtoisen kanssa saimme kuitenkin kuution palautettua robotin otteeseen ja tehtävän suoritettua. Mobiilirobotin tehtävänä oli kuljettaa sähköajoneuvon akku paikasta toiseen. Tämä tehtävä onnistui helposti intuitiivisen käyttöliittymän avulla. Ylivieskassa Robo3D Labissa tekniikasta vastasi TKI-kehittäjä Sami Sarlin. Esityksemme lopussa ohjasimme etänä myös kaivinkonetta. Kaivinkone sijaitsi fyysisesti rakennustyömaalla Oulussa, ja sitä ohjattiin työpajasta reaaliajassa iPadillä.
Narvikin esityksestä vastasi Halldor Arnarson, joka kertoi oppimisalustan rakentamisesta ja hyödyntämisestä Narvikin yliopistolla. Narvikissa oppimisalustaan on liitetty robottien lisäksi myös älykäs kuljetin, jota voidaan myös ohjata etänä. Kuljettimen tarkoituksena on siirtää kappaleita robottiasemalta toiselle. Professori Rauno Heikkilä Oulun yliopistolta esitteli autonomisia maansiirtokoneita ja niiden etäohjauksen hyödyntämismahdollisuuksia. Työpajan päätösluennossa Christos Gkournelos kertoi Patraksen yliopiston rakentamasta opetustehtaasta. Kuvassa 5 on hetkiä työpajan eri vaiheista.

Työpajamme oli ajallisesti keskiviikon viimeinen, ja työpajan päätyttyä lähdimme valmistautumaan illalliselle, joka järjestettiin Rotterdamin sataman lähellä. Illallisilla tutustuttiin vapaamuotoisemmin toisiin robotiikan asiantuntijoihin sekä laitetoimittajiin. Viihteestä vastasi Youtubesta tuttu standup-matemaatikko Matt Parker. Matt kertoi hauskasti matemaattisia pulmia ja havaitsemiaan epäkohtia.
Yhteenvetona toteamme ERF2022-tapahtuman olevan edelleen erittäin mielenkiintoinen robotiikan alan tapahtuma, joka ei pettänyt odotuksiamme tälläkään kertaa. Pidimme erityisesti näytteilleasettajien kanssa keskustelemisesta ja uusiin tuotteisiin ja innovaatioihin tutustumisesta. Työpajojen paras osio ovat lopussa käytävät keskustelut, joiden aikana syntyy usein uusia innovaatioita. Tapahtumaan osallistui tänä vuonna järjestämisvastuussa olleen Twenten yliopiston mukaan ennätykselliset yli 1 000 osallistujaa eri puolilta maailmaa. Kävijöiden joukossa oli huomattava osa Centrian kanssa Trinity-hankkeeseen osallistuvia tutkijoita. Ehdimmekin kiireiden keskellä ottaa yhteiskuvan Trinity-joukkueesta (KUVA 6). Seuraavan kerran ERF järjestetään keväällä 2023 Odensessa, Tanskassa. Sinne on tarkoitus suunnitella uusi työpaja.

Tero Kaarlela
Lehtori
Centria-ammattikorkeakoulu
p. 040 487 7513
Sakari Pieskä
Tutkimusyliopettaja
Centria-ammattikorkeakoulu
p. 044 449 2564
Tomi Pitkäaho
TKI-päällikkö
Centria-ammattikorkeakoulu
p. 040 485 8219