


Sakari Pieskä
Jorma Hintikka

Pienet ja keskisuuret tuotannolliset yritykset kohtaavat monenlaisia haasteita kiristyvässä kilpailussa. Osaavan työvoiman houkutteleminen ja pienten sarjakokojen valmistaminen kustannustehokkaasti ovat tällä hetkellä keskeisimpiä haasteita. Ihmisen ja robotin yhteistyöhön perustuva ketterä robotiikka tarjoaa mahdollisuuksia vastata näihin haasteisiin ja pitää tuotantoa ja työpaikkoja kustannustehokkaasti Suomessa. Vuoden 2019 alussa käynnistynyt Horisontti 2020 -hanke TRINITY tarjoaa pk-yrityksille esimerkkisovelluksia ja rahoitusmahdollisuuksia yritysten omiin ketterän robotiikan kehityshankkeisiin ja niihin liittyviin kokeiluihin.
Robotteja on hyödynnetty jo pitkään suursarjatuotannossa esimerkiksi auto- ja elektroniikkateollisuudessa. Perinteinen teollisuusrobotiikka ei joustamattomuutensa vuoksi sovellu piensarjatuotantoon, joka on tyypillistä pk-yrityksissä (Reimann & Sziebig 2019; Pieskä, Kaarela & Mäkelä 2018). Ihmisen ja robotin yhteistyöhön perustuva ketterä robotiikka tarjoaa mahdollisuuksia toteuttaa myös piensarjatuotantoa kustannustehokkaasti Suomessa. Yhteistyörobotiikka (collaborative robotics) tarjoaa myös pk-yrityksille uusia mahdollisuuksia parantaa kilpailukykyään robotiikan avulla, mutta yritysten tiedonpuute mahdollisuuksista on rajoittanut soveltamista. Ketterien innovaatiomenetelmien (esim. Morris, Ma & Wu 2014; Rigby, Sutherland & Takeuchi 2016) kaltaisten toimintatapojen soveltaminen on ohjelmistokehityksen lisäksi mahdollista myös monilla muilla alueilla, myös nopeatempoiseen piensarjatuotannon kehittämisessä ihmisen ja robotiikan yhteistyön avulla.
Ketterällä tuotannolla myös pienet sarjat kannattaviksi
Ketterän tuotannon kehittämisessä keskeisimpiä asioita ovat ihmisen ja robotin joustava yhteistyö sekä nopea konfiguroitavuus eri tuotteiden valmistukseen. Ihmisen ja robotin yhteistyöllä voidaan hyödyntää molempien osapuolten parhaat ominaisuudet. Ihminen on havainnointikyvyltään monipuolinen, joustava ja muuttuviin tilanteisiin mukautuva. Ihmisellä on esimerkiksi tartuntakykyyn ja kognitiiviseen tiedonkäsittelyyn liittyviä ominaisuuksia, joita on hankalaa tai kallista toteuttaa robotille. Robotin vahvuuksia puolestaan ovat esimerkiksi nopeus, tarkkuus ja kykeneminen tasalaatuiseen työskentelyyn myös pitkään jatkuvassa tauottomassa toiminnassa. Yhteistyörobotiikalla pyritään integroimaan ihmisen ja robotin parhaat puolet. Myös robottiratkaisun helppo muuntaminen toiseen sovellukseen (uudelleen konfiguroitavuus) nousee tuotannon sarjakokojen jatkuvasti pienentyessä keskeiseksi elementiksi tuottavuuden nostossa robotiikan avulla.
Robotit häkeistä ihmisten työkavereiksi
Perinteisesti tuotannossa käytettävät robotit työskentelevät yleensä turva-aidan sisällä erillään ihmisistä. Laserskannaukseen, konenäköön, voima-anturointiin ja ohjelmistoratkaisuihin perustuva turvallisuusteknologian kehittyminen voi nykyisin mahdollistaa ihmisten ja robottien työskentelytilojen yhdistämisen, erityisesti pienten kappaleiden käsittelyssä (Shu, Sziebig & Pieskä 2018). Liiman levitys, ruuvaus ja kevyt kokoonpano ovat esimerkkejä tehtävistä, joissa cobotteja (collaborative robots) on jo sovellettu tuotantoon useiden vuosien ajan. Tämä on nostanut tuotannon kapasiteettia, koska nyt robotit voivat toimia samassa tilassa ilman erillisiä turvatoimenpiteitä turvallisuutta kuitenkaan laskematta. Cobotit on suunniteltu helposti ohjelmoitaviksi, jolloin käyttäjän ei tarvitse olla ohjelmointiekspertti. Laitetoimittajat esittelevätkin usein cobotit robotteina, joissa ei tarvita ohjelmointia. Vaikka cobotit on suunniteltu itsessään turvallisiksi, koko sovellukselle tulee aina tehdä riskianalyysi. Cobottien on täytettävä ISO 10218 -turvallisuusstandardin ja ISO / TS 10566 teknisen määrittelyn vaatimukset (Rosenstrauch & Krüger 2017).
Cobotteja keveiden kappaleiden käsittelyyn, suuret kappaleet haasteellisia
Markkinoilla on tällä hetkellä jo noin 100 erilaista cobottityyppiä, jotka muutamaa poikkeusta lukuun ottamatta on suunniteltu noin 10 kg:n tai sitä pienempien kappaleiden käsittelyyn, esimerkkejä coboteista vuoden 2019 Hannoverin teollisuusmessuilta on esitetty kuvassa 1. Cobottimarkkinoille ennustetaan useissa markkinaraporteissa kovia kasvulukuja ja esimerkiksi Market and Markets (2018) arvioi cobottimarkkinoiden olleen vuonna 2018 710 miljoonaa dollaria (USD) ja kasvavan vuoteen 2025 mennessä 12,3 miljardiin dollariin. Vuotuisen kasvuprosentin arvioidaan olevan yli 50%. Kasvun syiksi arvioidaan cobottien perinteisiä teollisuusrobotteja nopeampi takaisinmaksuaika alemmasta hinnasta johtuen, mikä tulee lisäämään niiden käyttöä eritysesti pk-yrityksissä. Myös Industry 4.0 mukainen kehitys teollisen internetin, tekoälyn ja helppokäyttöisten käyttöliittyminen osalta edistää cobottien käytön laajenemista. Cobottien käyttöön liittyy usein myös autonomisia mobiilirobotteja, jotka yhteistyössä ihmisten kanssa tuovat ja vievät komponentteja tai tuotteita cobottisolusta toiseen tai esimerkiksi pakkaamoon. Nykyiset autonomiset mobiilirobotit (AMR = Autonomous Mobile Robots tai AIV = Autonomous Intelligent Vehichles) ovat joustavampia, monipuolisempia ja edullisempia teollisuudessa jo pitkään käytettyihin vihivaunuihin (AGV = Automous Guided Vehicles) verrattuna.

Suurten kappaleiden käsittelyssä ihmisen ja robotin turvallinen yhteistyö on haasteellista. Esimerkiksi rakennustyömailla ei robotteja juuri näy (Paavola 2019), mutta rakentamiseen liittyvässä osakomponenttien teollisessa valmistuksessa niitä jo käytetään. Ihmiseen ja robotin ketterällä yhteistyöllä voitaisiin näitä sovelluksia saada lisää ja näin parantaa alan yritysten kilpailukykyä. Centria toteuttaa TRINITY-hankkeessa suurten kappaleiden käsittelyyn ja prosessointiin liittyviä käyttäjädemonstraatioita.
TRINITY auttaa pk-yrityksiä ketterän tuotannon kehittämisessä
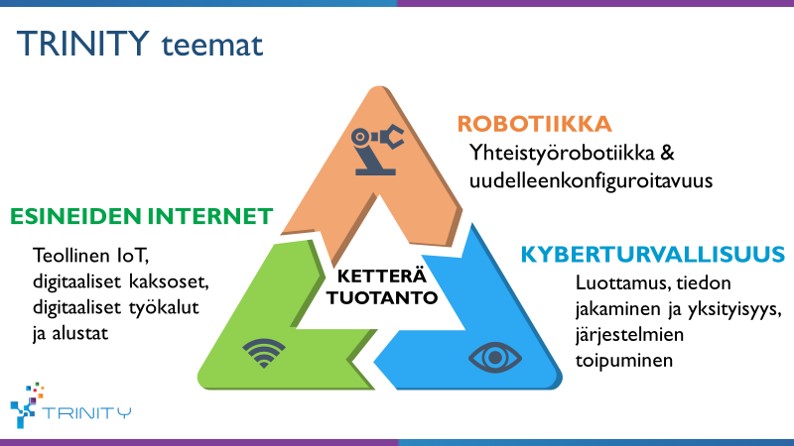
Vuoden 2019 alussa liikkeelle lähtenyt Horisontti 2020 -hanke TRINITY pyrkii parantamaan eurooppalaisten pienten ja keskisuurten valmistavien yritysten ketteryyttä ja innovaatiokykyä robotiikan ja teollisen internetin (Industrial Internet of Things, IIoT) avulla kyberturvallisuus huomioon ottaen (ks. Kuva 2).
Robottisolujen toteutuksessa IIoT:n ratkaisuilla on kasvava merkitys. Niiden avulla voidaan kerätä reaaliaikaista tietoa, jota voidaan hyödyntää erilaisissa digitaalisissa alustoissa ja varsinkin digitaalisissa kaksosissa (digital twin). Digitaalinen kaksonen pyrkii esittämään mahdollisimman todenmukaisen mallin fyysisestä ympäristöstä, esimerkiksi tuotantosolusta, rakennuksesta tms. Tähän visualisointimalliin yhdistetään tarvittavaa dynaamista tietoa ja / tai analysoitua tietoa eri lähteistä, esimerkiksi robottien omilta tai IIoT-sensoreilta ja toimilaitteilta, niiden data-analyyseista (tekoäly tulossa mukaan) sekä digitaalista suunnittelutietoa, esimerkiksi BIM (Building Information Modelling) mallinnuksesta. Toteutuksissa turvallisuus on keskeinen tekijä. Ihmisen ja robotin yhteistyö varmistetaan useimmiten useammista turva-antureista koostuvilla järjestelmillä. Toteutettujen ratkaisujen tietoturva on myös varmistettava. Tähän kyberturvallisuuteen kuuluvat järjestelmien kyvykkyys tietoturvahyökkäysten torjumiseen ja luotettavaan häiriötilanteista toipumiseen.
TRINITY-hankkeessa myös luodaan robotiikan digitaalisten innovaatiokeskusten (Digital Innovation Hub, DIH) verkosto, joka jatkaa toimintaa myös projektin päätyttyä. Tavoitteena on avata digitaalinen yhteyspiste kaikille hankkeen palveluille. Nelivuotisessa TRINITY-hankkeessa on 16 partneria 10 maasta ja kokonaisbudjetti on noin 16 milj. €. Hankkeen koordinaattorina toimii Tampereen yliopisto professori Minna Lanzin johdolla, Suomesta on Tampereen yliopiston ja Centrian lisäksi mukana myös Fastems Oy.
TRINITY-hanke pyrkii edistämään ketterän robotiikan käyttöönottoa esittelemällä hankekonsortion kanssa parikymmentä kehittynyttä demonstraatiota uusien robottiteknologioiden mahdollisuuksista yrityksille ja tarjoamalla pk-yrityksille rahoitusmahdollisuuksia heidän omiin kokeiluihinsa kahden avoimen haun kautta, joista ensimmäinen käynnistyy marraskuussa 2019.
Lähteet
Markets and Markets. 2018. Collaborative Robot Market worth $12,303 million by 2025. Saatavilla: https://www.marketsandmarkets.com/PressReleases/collaborative-robot.asp, Luettu 13.6.2019.
Morris, L., Ma, M. and Wu, P.C., 2014. Agile innovation: The revolutionary approach to accelerate success, inspire engagement, and ignite creativity. John Wiley & Sons.
Paavola, J. 2019. Raksamies lyö vielä robotin. Rakennustaito 29.4.2019. 3s.
Pieskä, S., Kaarela, J. & Mäkelä, J. 2018. Simulation and programming experiences of collaborative robots for small-scale manufacturing. 2nd International Symposium on Small-scale Intelligent Manufacturing Systems (SIMS), Cavan, 2018, 4 s.
Reimann, J. & Sziebig, G. 2019. The Intelligent Factory Space – A Concept for Observing, Learning and Communicating in the Digitalized Factory. in IEEE Access. 11 s. Saatavilla: doi: 10.1109/ACCESS.2019.2919340, Luettu 13.6.2019
Rigby, D.K., Sutherland, J. and Takeuchi, H., 2016. Embracing agile. Harvard Business Review, 94(5), s. 40-50
Rosenstrauch, M. J., & Krüger, J. 2017. Safe human-robot-collaboration-introduction and experiment using ISO/TS 15066. In 2017 3rd International Conference on Control, Automation and Robotics (ICCAR). IEEE, s. 740-744
Shu, B, Sziebig, G. & Pieskä, S. 2018 Human-Robot Collaboration: Task Sharing Through Virtual Reality, IECON 2018 – 44th Annual Conference of the IEEE Industrial Electronics Society, Washington, DC, 2018, s. 6040-6044